C# | GITHUB | UNITY
A self-driving simulation
Project Planning and Tools
- Unity ML
- Doxygen
- Trello
- Git with GitHub for source control
- Git Flow Model
- Git LFS
Overview
This is a project I implemented over my semester break as an introduction to Machine Learning (ML). The project uses the Unity Machine Learning Framework and is implemented through the Unity Editor.
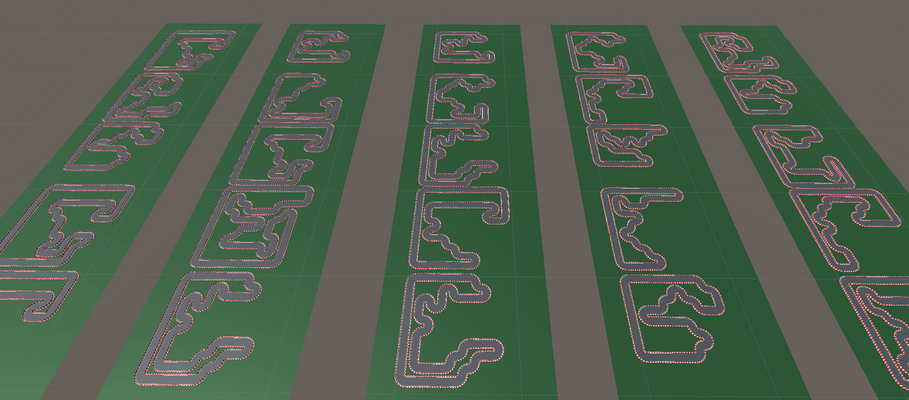
The project’s goal was to train a neural network to navigate around any racetrack without crashing and in the fastest time possible. I began by making a random racetrack generator as I didn’t want the ML Agent to learn to race one racetrack instead of how to navigate between the barriers of any racetrack. Once this was completed I created the vehicle and began verifying that the tracks could be completed. Since this was possible, I knew it would be possible to train an AI to race the track.
I then began understanding what information to provide the ML Agent to best navigate the racetracks. After some testing, I found that providing a normalised velocity and eight ray-casts that project from the front and sides of the vehicle were adequate information to navigate the racetracks.
I set two reward parameters to incentivise the ML Agent to navigate the track and learn the desired behaviours. The first reward was a small amount based on its current speed to encourage it to go as fast as possible. The second was from checkpoints on the racetrack, which were triggered when the vehicle passed through them; these gave the most rewards and encouraged it to keep going around the track.
After correcting the rewards and information, I began training the neural network using 25 cloned ML-Agents. These all learnt in parallel and used the same neural network, significantly speeding up the training process. It took 2 hours for the neural network to race around the track, and it continued for 10 hours until it was comfortable navigating a large variety of racetracks.
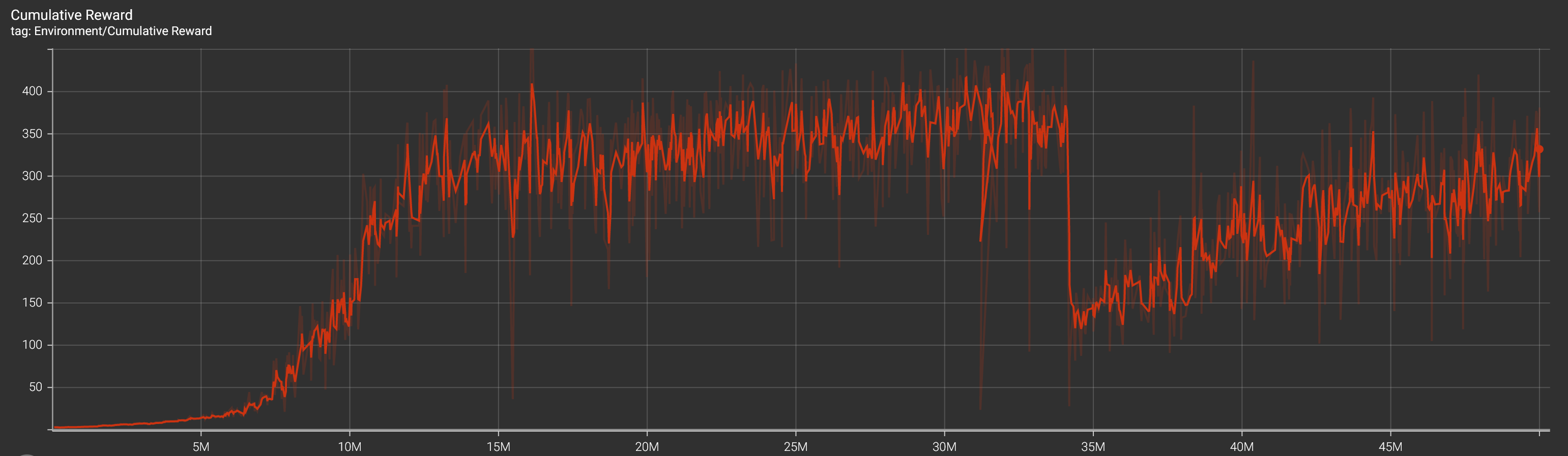
The above image shows the reward over time (steps) and how the ML Agent progressed as it learnt, with each 5 million steps taking around 1 hour. The dip at 34 million steps was when the size of the racetracks increased, allowing the AI to go faster on long straights. This meant it had to learn to slow down properly to turn the corners at the end of the straight.
Random Racetrack Generation
To help train the neural network to race any racetrack, I implemented an algorithm to create random racetracks that are regenerated every time the AI crashes the car. The algorithm uses a grid system and places a specified amount of points within the grid. The points are ordered clockwise and then connected using the A* pathfinding algorithm.
A demo of the pathfinding algorithm can be found here: A* Pathfinding Demo
This information was then used to instantiate new straight and corner racetrack prefabs, and orientate them based on the last and next node’s position on the grid.